行人檢測系統的描述和操作
汽車製造商不懈努力,以提高所有道路使用者的安全並最大程度地降低受傷風險。 一種方法是避免與行人發生碰撞。 下面介紹行人檢測系統的特點、它們的佈置方式和工作原理,以及使用此類解決方案的優點和缺點。
什麼是行人檢測?
行人檢測系統旨在防止或最大程度地減少與道路使用者發生碰撞的後果。 該功能無法將事故數量減少至 0%,但它的使用可將事故死亡人數降低 20%,並將嚴重傷害的可能性降低 30%。
主要困難在於邏輯實現的複雜性。 使用檢測行人的程序和技術手段沒有問題。 在拯救生命的危急情況下,在預測運動方向和人類行為的階段會出現困難。
系統的目的和功能
該系統的主要目的是防止車輛與行人相撞。 測試結果表明,該解決方案在高達 35 公里/小時的速度下完美運行,並消除了高達 100% 的碰撞。 當車輛行駛速度較快時,系統無法正確識別物體並及時響應,因此無法保證完全的安全。 系統主要功能:
- 行人檢測;
- 分析危險情況並評估碰撞可能性;
- 聲音告知駕駛員有關威脅的信息;
- 自動降低速度或改變運動軌跡;
- 車輛完全停止。
系統由哪些元素組成?
由於汽車配備了特殊的軟件和硬件,該系統的運行才成為可能。 它包括:
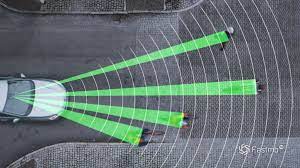
- 汽車前面的攝像頭和雷達 - 掃描汽車前面的道路並識別距離最遠 40 米的物體。
- 控制單元是從行人檢測裝置接收信息的電子設備。 該單元旨在配置和控制系統,並在發生碰撞威脅時通知駕駛員。
- 軟件——負責識別行人和其他物體的方式,預測和分析情況的正確性,在緊急情況下做出決策。
現代系統的技術實現使得分析道路狀況、干擾的存在併計算安全軌跡成為可能。
邏輯與工作原理
行人檢測系統掃描半徑40米內的空間。 如果攝像機檢測到物體並且雷達也確認了這一點,那麼它會繼續跟踪並預測運動。 當情況達到關鍵點時,駕駛員會收到聲音通知。 缺乏響應會觸發自動制動、軌跡改變或車輛停止。 為了識別行人,使用了以下原則之一:
- 整體或部分檢測;
- 從數據庫中搜索樣本;
- 使用多個攝像機的結果。
為了獲得更大的效果,將多個選項結合起來,這保證了工作中的錯誤和差錯最小化。
不同廠家系統名稱及區別
最初,沃爾沃考慮了行人安全,後來天合和斯巴魯推出了類似的系統。
- 沃爾沃的行人檢測系統 (PDS) - 使用單個攝像頭讀取地形。
- TRW 的高級行人檢測系統 (APDS) - 包含攝像頭和雷達。
- 斯巴魯的 EyeSight - 兩個攝像頭,沒有雷達來檢測道路使用者。
無論技術實現如何,所有系統都有相似的操作原理和同一個目的。
優點和缺點
該技術方案讓汽車出行更加舒適、安全。 行人檢測系統的主要優點:
- 減少事故數量;
- 時速高達 100 公里/小時時 35% 預防碰撞;
- 降低事故中危險傷害和死亡的水平;
- 交通安全的提高。
缺點中,值得注意的是:
- 系統選擇有限;
- 高速工作的困難;
- 成本高。
隨著技術的發展,這些問題將會被消除。
製造商對無人駕駛車輛和道路安全的渴望將導致事故數量的減少。 我們仍然希望未來物體識別、威脅預測和碰撞避免的質量能夠得到提高。 即使在高速行駛時,這也可以避免發生事故。
